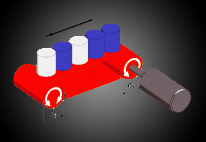
La carga constante o variable se traslada en una cinta transportadora movida con el motor sin escobillas.
La fuerza de transporte (FL) y la velocidad de transporte (vL) se usan junto con el diámetro (d1) del rodillo tractor para calcular el par de salida (MB) y la velocidad de salida (nB) del motor sin escobillas.
Si hay pérdidas importantes en la transmisión (fricción,…), una eficiencia ( μ ) menor del 100%, se tiene que considerar este valor para seleccionar un accionamiento más potente.
En funcionamiento intermitente (cambios de aceleración-deceleración y cambios de carga) entra en los cálculos la masa transportada (ML) . La masa máxima se debe de introducir con los cambios en la carga.
Si el rodillo tractor y las poleas guía tienen una inercia considerable (J1, J2), también deberían incluirse en los cálculos dinámicos.
Cálculos básicos
Ejemplo: Hemos de desplazar una masa de 1 kg en una cinta transportadora, a una velocidad de 15 m/s. Los rodillos utilizados tienen un diámetro de 5 cm y nos indica el fabricante que después del pretensado de la cinta , el rendimiento del sistema es del 95 %.
Se pide calcular las prestaciones mecánicas útiles (par, velocidad, potencia) del motor sin escobillas necesarias para desplazar esta carga.
 Par del motor Mb = ( d1 / 2 ) x ( FL / η)
Par del motor Mb = ( d1 / 2 ) x ( FL / η)
Mb = ( 0,05 m / 2) x ( 10 N / 0,95 ) = 0,26 Nm = 260 mNm
Velocidad del motor Nb = ( 60 / 3,1416 ) x (15 m/s / 0,05 m )= 5.730 rpm. P = ( π / 30000 ) x M x n
Potencia mecánica útil P = 0,000105 x 260 mNm x 5730 rpm = 156,42 W
* 1 kg ~ 10 Newtons Nb = ( 60 / π ) x ( VL / d1 )
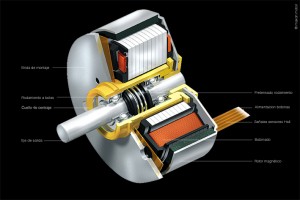 El motor brushless directo es una solución silenciosa, sin mantenimiento y precisa.
El motor brushless directo es una solución silenciosa, sin mantenimiento y precisa. Elimine las holguras mecánicas o backlash con un encoder absoluto lineal.
Elimine las holguras mecánicas o backlash con un encoder absoluto lineal. Permite crear automatismos y control de ejes sin necesidad de interruptores de fin de carrera o procedimiento de Homing.
Permite crear automatismos y control de ejes sin necesidad de interruptores de fin de carrera o procedimiento de Homing.
